Project Overview
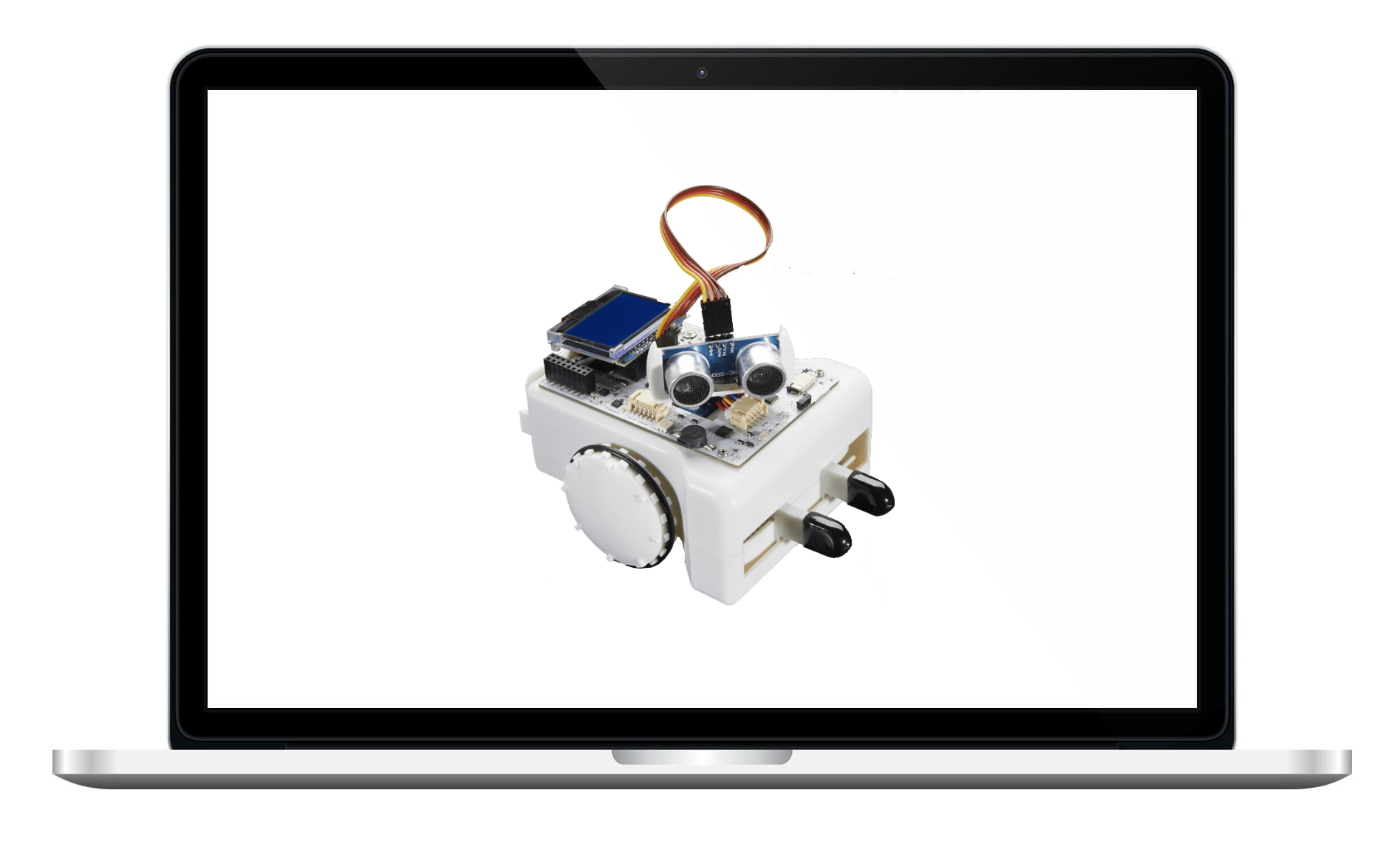
This code establishes the fundamental functionality of a patrolling robot using the Sparki microcontroller. The robot autonomously patrols by detecting and following lines, avoiding obstacles through ultrasonic sensors, and executing predefined patterns in the absence of detected lines. Practical implications of this code include applications in security and surveillance for monitoring large areas, safety inspections in industrial environments, and efficiency improvement by automating routine patrols. The code's modular nature allows for customization and extension, offering versatility for various applications and environments. Overall, it provides a foundation for creating adaptable patrolling robots with real-world implications in different industries and scenarios.